Robust Visual Odometry in Underwater Environment
Published in OCEANS'18 MTS/IEEE Kobe / Techno-Ocean, 2018
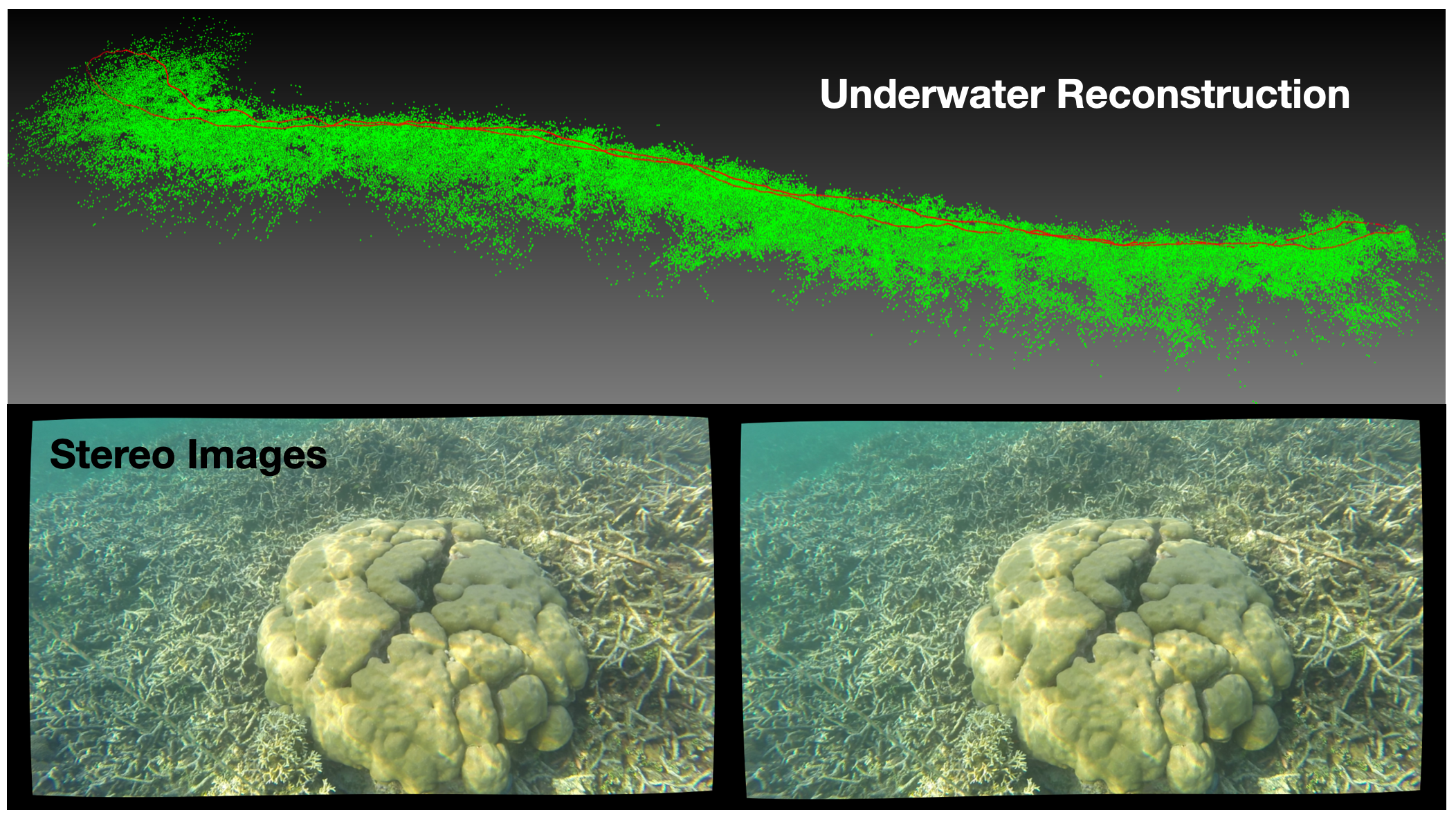
Abstract. The accurate estimation of pose and velocity of an autonomous underwater vehicle (AUV) is critical to ensure the repeatability and validity of scientific data that is captured using sensors onboard the AUV. A low-cost and effective way is by using stereo camera sensors to perform visual odometry (VO). However, this is a difficult problem in underwater due to poor imaging condition and inconsistent motion caused by water flow. This paper proposes a robust and effective stereo underwater VO system that can overcome aforementioned difficulties and accurately localize the AUV. Experimental results demonstrate that the proposed pipeline outperforms existing VO systems in underwater environment, as well as obtains a comparative performance on the KITTI benchmark dataset.
DOI: 10.1109/OCEANSKOBE.2018.8559452
Reference:
- J. Zhang, V. Ila and L. Kneip, “Robust Visual Odometry in Underwater Environment,” 2018 OCEANS - MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, 2018, pp. 1-9, doi: 10.1109/OCEANSKOBE.2018.8559452.